



Controlando servo com potenciômetro
Este é um exemplo básico que demonstra como controlar um Servo motor com o uso de um potenciômetro e o Arduino. As variações no eixo do potenciômetro serão proporcionais ao ângulo com o qual o servo se move. Isto é possível devido a utilização da função map().
Dificuldade:
Montagem: 
Programação:
Material Utilizado:
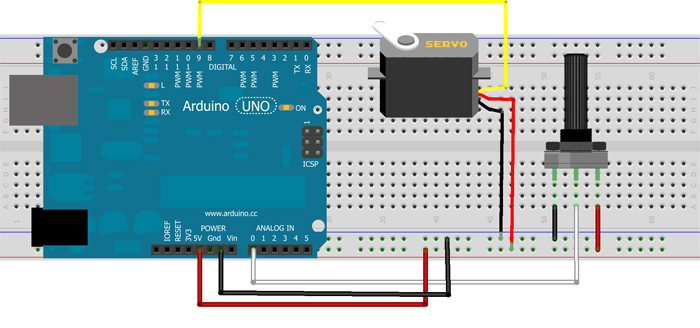
A Montagem
O Sketch
Não esqueça de importar a biblioteca para o Arduino: Biblioteca_Servo

#define pino_pot 0
#include <Servo.h>
Servo servoldg; // cria o objeto para controlar o servo
void setup()
{
servoldg.attach(9); // conecta o servo ao pino 9
}
void loop()
{
servoldg.write(map(analogRead(pino_pot), 0, 1023, 0, 179));
// analogRead (): Faz a leitura analógica no pino do potenciômetro (retorna com um valor de 0 a 1023
// map (): Muda a escala da leitura de 0~1023 para 0~179 (converte em angulo para o servo)
//servoldg.write(): Lê o valor do angulo dado pelo map() e gera o pulso para movimentar o servo.
delay(20); // espera para o servo ter tempo de se movimentar
}


