



Ponte H para controle de sentido de Motor DC
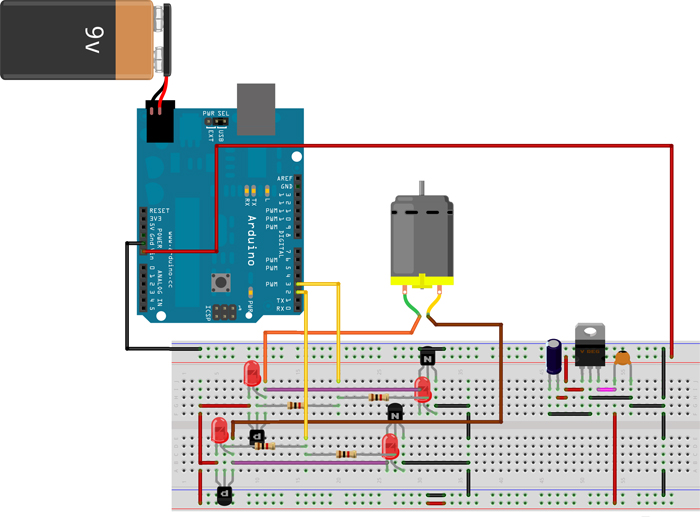
Com esse exemplo, você aprenderá como montar uma ponte H para controlar o sentido de rotação de um motor DC, juntamente como um regulador de tensão de 5V para alimentar o motor DC, entregando a corrente necessária motor.
Dificuldade:
Montagem: 
Programação:
Material Utilizado:
Bateria 9V
A Montagem
O Sketch

#define HOR 2 //Define HOR como 2
#define ANT 3 //Define ANT como 3
void setup()
{
pinMode(HOR, OUTPUT); //Configura o pino 2 como saída
pinMode(ANT, OUTPUT); //Configura o pino 3 como saída
digitalWrite(HOR, LOW); //Coloca o pino 2 em nível lógico baixo
digitalWrite(ANT, LOW); //Coloca o pino 3 em nível lógico baixo
}
void loop()
{
move_horario(); //Executa a função para girar o motor no sentido horário
delay(2000); //Gira por 2 segundos
parar(); //Para o motor
delay(1000); //Aguarda 1 segundo
move_anti_horario(); //Executa a função para girar o motor no sentido anti-horário
delay(2000); //Gira por 2 segundos
parar(); //Para o motor
delay(1000); //Aguarda 1 segundo
}
void move_horario() //Função para girar o motor no sentido horário
{
digitalWrite(ANT, LOW); //Coloca o pino 3 em nível lógico baixo
digitalWrite(HOR, HIGH); //Coloca o pino 2 em nível lógico alto
}
void move_anti_horario() //Função para girar o motor no sentido anti-horário
{
digitalWrite(HOR, LOW); //Coloca o pino 2 em nível lógico baixo
digitalWrite(ANT, HIGH); //Coloca o pino 3 em nível lógico baixo
}
void parar() //Função para parar o motor
{
digitalWrite(HOR, LOW); //Coloca o pino 2 em nível lógico baixo
digitalWrite(ANT, LOW); //Coloca o pino 3 em nível lógico baixo
}


